1、单轴伺服模组运动控制科研教学平台
实验平台介绍
单轴伺服模组运动控制科研教学平台由控制系统和执行机构系统两部分组成。控制系统有PC机、实时仿真控制器等,采用MATLAB/Realtime Explorer软件编程,能够实现基于模型的自动控制系统设计。执行机构系统由EtherCAT总线型伺服驱动器、单轴滚珠丝杆模组和模组负载配重块组成。该执行机构采用总线型伺服驱动器,可以大大简化系统的电路设计,提高平台可靠性。同时为了区别不同组别实验、系统辨识、控制器设计和参数调试等功能,丝杆平台设计了可拆装配重块,用于调整系统被控对象的惯量参数。
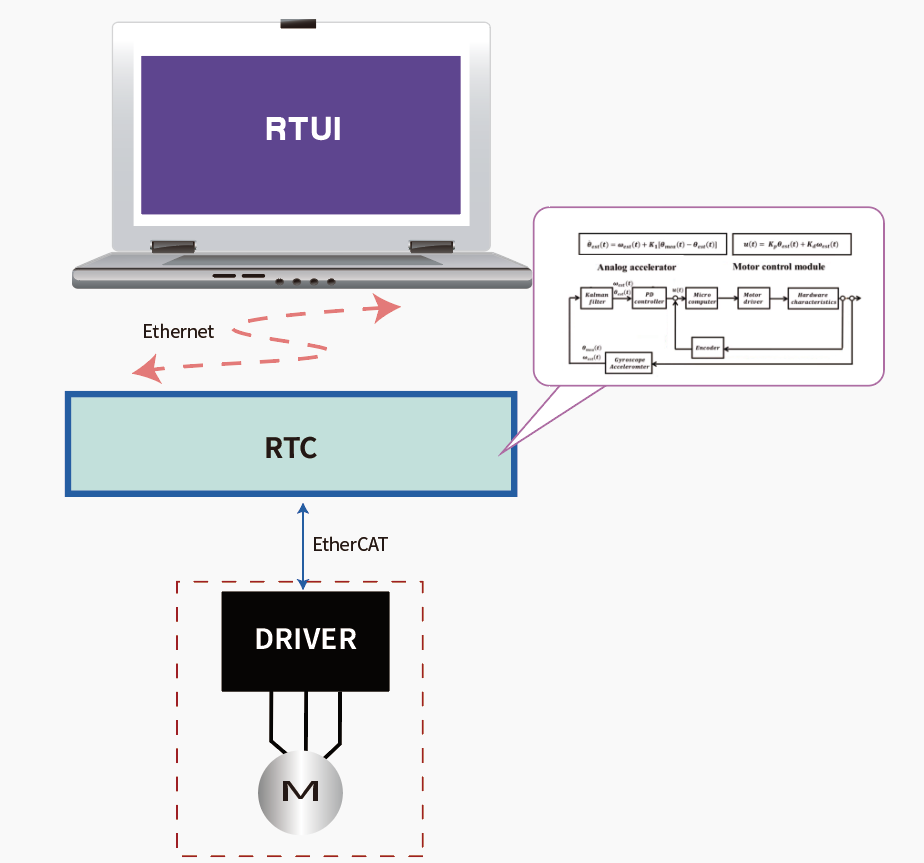
系统拓扑
| RTUI:实时控制器(仿真器)的上位机 | RTC:实时控制器(仿真器) |
| DRIVER:成熟驱动器(变频器) | M:测试电机或加载电机 |
实验内容
平台系统组成认知
单轴模组T/S型速度规划
单轴模组的力矩控制
单轴模组的时域分析
单轴模组的位置环控制器设计与调试
单轴模组的位置控制
单轴模组的速度控制
单轴模组的动力学模型辨识
单轴模组的频域分析
基于深度神经网络的单轴伺服模组非线性系统辨识实验
2、双机械臂工业机器人新能源电池装配流水线科研教学平台
实验平台介绍

本项目配套2套工业机器人实训站,系统广泛使用真实工业执行器、传感器和控制设备,完整模拟工业4.0“智能生产”过程,提供给学生更多实践实训及自由学习空间。
整体尺寸(mm):1500*1000*1600;左右围板采用5mm亚克力玻璃,顶部采用5mm亚克力玻璃制造而成,防止设备操作时误伤实验人员。基础台架带4个高度可调的活动脚轮,方便移动。
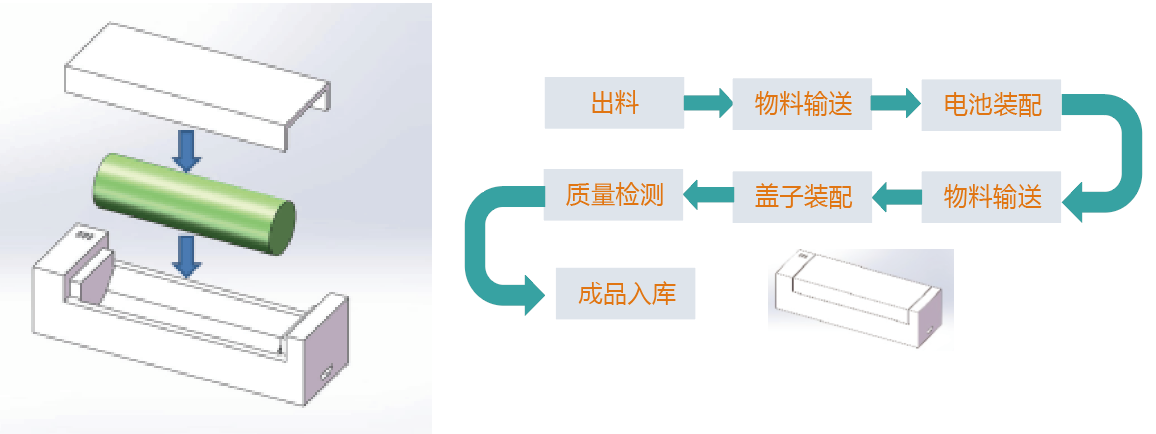
电池充电盒,是由1个底座、1个面板、1个电池共3种零件组成。根据充电器制造工艺流程图,需2台工作站来完成电池装配任务,这2台工作站相互配合,形成一条自动化产线,工作站之间通过一条传送带进行传输,工作站1完成取电池底座并装配工艺,工作站2完成质量检测及入库工艺。
实验内容
1、配套实训:
01、工艺设计:控制逻辑设计、控制系统设计
方案输出:控制系统选型、通讯方式选择、上位机选型、
编制整 体设计方案
2、自动化产线子系统设计
01、物料搬运系统硬件设计
02、系统自动工艺设计
03、PLC与机器人握手过程
04、PLC系统设计
05、HMI画面设计
06、机器人轨迹设计
07、子系统程序调试
3、工业机器人应用
01、工业机器人在中国,机器人介绍,规格参数,安全注意事项。02、机器人示教器面板介绍,机器人的手动操作,机器人的转数计数器更新操作
03、机器人I/O通信的种类,常用机器人标准I/O板的说明,标准I/O板——DSQC652板的配置,I/O信号监控与操作,系统输入/输出与I/O信号的关联,示教器可编程按键的使用
04、程序数据,建立程序数据的操作,程序数据类型与分类,三个关键程序数据的设定
05、RAPID程序及指令,建立程序模块与例行程序,常用RAPID程序指令,建立一个可以运行的基本RAPID程序,功能的使用介绍,RAPID程序指令与功能,中断程序TRAP
06、机器人控制柜、机器人的本体、机器人的安全保护机制
07、RobotStudio的软件界面介绍、构建基本仿真工业机器人工作站、建立工业机器人系统与手动操纵、创建工业机器人工件坐标与轨迹程序、仿真运行机器人轨迹
3、基于Matlab/Simulink的协作机器人科研教学平台
实验平台介绍
机器人本体采用自主设计的3Kg负载六自由度协作机器人,机器人每个关节集成电机、减速器和驱动电路,外观设计美观,适合实验室摆放。本体重复定位精度为±0.05mm,本体自重为17Kg,在保证运动精度和性能的基础上,提高学生实验过程的安全性。
控制器采用实时仿真控制器,软件上采用Matlab/Simulink编程,机器人运动学、动力学、视觉/力觉传感器采集、运动规划、系统集成等每一个实验例程的代码均可在Matlab/Simulink中编写。除了基本运动学控制之外,配合视觉传感器、力觉传感器、末端夹持器、气路等配件,能够组成多功能机器人工作站。
上位机采用Matlab软件的RealTime Explorer进行调试,可以实现完全可视化调试,实时显示Matlab/Simulink控制模型中的所有变量,并将其离线保存并在Matlab中绘图。
协作机器人每个关节均可在位置、速度、力矩三种模式下工作,在基本运动学教学实验的基础上可以进行动力学控制科研的开展。
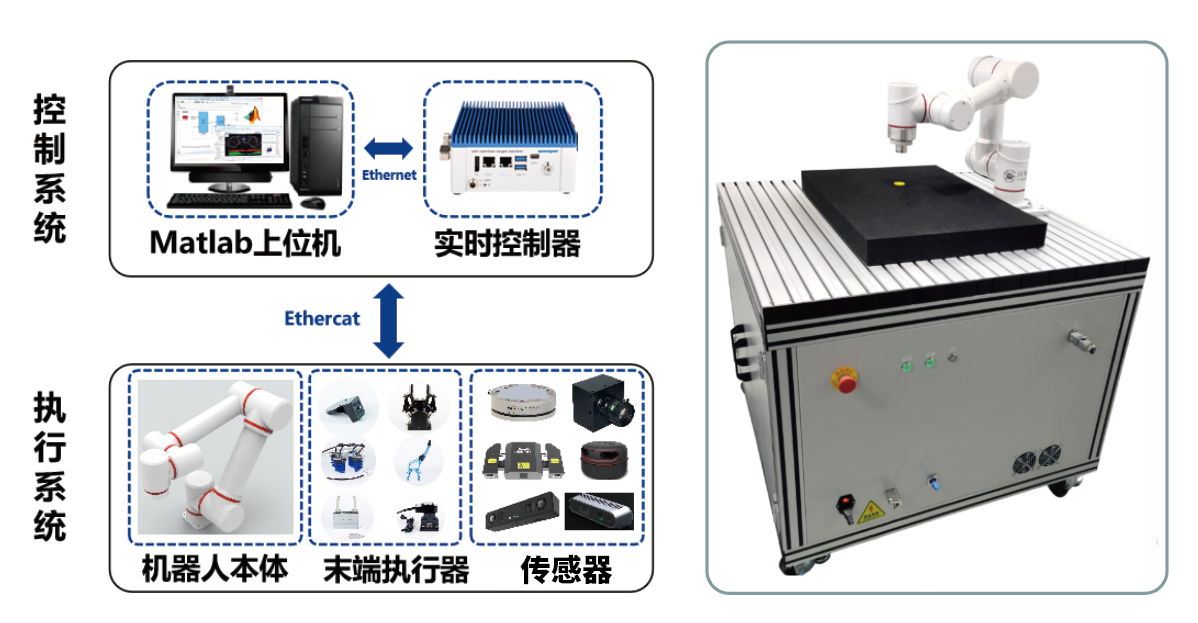
协作机器人平台主要部件和连接关系,分为控制系统和执行系统两部分。控制系统由Matlab上位机和实时控制器两部分组成。机器人控制程序在Matlab上位机中编写、编译和调试,在实时控制器中执行。上位机和实时控制器之间通过Ethernet网络连接。执行系统主要由协作机器人本体,电磁铁(末端执行器)和配套的电气部件构成。机器人本体采用六自由度协作机器人,标配本体额定负载3Kg(另有5Kg可选),机器人各关节集成电机、减速器、驱动电路,本体与控制柜仅需要一根电缆即可,结构紧凑。机器人抓取操作通过末端安装的电磁铁吸取具有磁性的物体完成。电气部件包括急停按钮、启动开关、开关电源、接线端子等。
实验内容及目的
01、机器人系统组成认知:本实验首先进行本实验平台软硬件组成的 认识,了解机器人本体的结构、学会机器人控制器的基本编程方法
02、机器人单轴控制:以六轴为例,使用Speedgoat控制器进行机器人单关节的控制,能够控制机器人六轴的位置/速度/力矩,能够读取机器人六轴相应的位置/速度/力矩反馈数据。然后依次控制机器人的1~5轴,进行相应的单轴运动
03、机器人运动学正解验证(基于DH法):以改进的DH法进行机器人正运动学的建模,单轴运动机器人的各关节,能够正确计算出机器人的位置和姿态
04、机器人运动学正解验证(基于POE法):以指数积法进行机器人正运动学的建模,单轴运动机器人的各关节,能够正确计算出机器人的位置和姿态
05、机器人运动学逆解验证(基于DH法):给定一个机器人末端的位置和姿态,能够正确的解算出机器人各关节的控制量,并完成慢速的空间直线运动
06、机器人运动学逆解验证(基于POE法):给定一个机器人末端的位置和姿态,能够正确的解算出机器人各关节的控制量,并完成慢速的空间直线运动
07、机器人T型速度规划:基于T型速度规划对空间直线的运动进行速度规划
08、机器人S型速度规划:基于S型速度规划对空间直线的运动进行速度规划
09、机器人点到点运动轨迹规划(基于三次样条曲线):基于三次样条曲线对多点运动进行拟合,进行轨迹规划
10、基于位置环的机器人绘图实验:在机器人末端安装马克笔,通过G代码的编译和解析程序,完成机器人在平面内的绘图任务
11、机器人视觉---机器人手眼标定(Eye-in-hand):在机器人末端安装摄像头,进行摄像头内外参数的标定
12、基于Eye-in-hand的机器人拼积木实验:通过Eye-in-hand的方式进行机器人末端手抓进行积木的简单拼图
13、机器人视觉---机器人手眼标定(Eye-to-hand):在机器人工作台固定处安装摄像头,进行摄像头内外参数的标定
14、基于Eye-to-hand的机器人拼积木实验:通过Eye-to-hand的方式进行机器人末端手抓进行积木的简单拼图
15、ATI六维力传感器标定及重力补偿实验:基于Ethernet进行六维力传感器数据的读取,通过实验法进行传感器坐标系、工具末端重力的辨识
16、基于力反馈的机器人绘图实验:基于力传感器的力反馈在实验十一的基础上保持绘制图案的接触力的恒定
17、基于强化学习算法的机器人轴孔装配实验:基于计算机视觉和力传感器数据,应用强化学习算法进行机器人轴孔装配实验
4、开放式双臂协作机器人科研教学平台
实验平台介绍
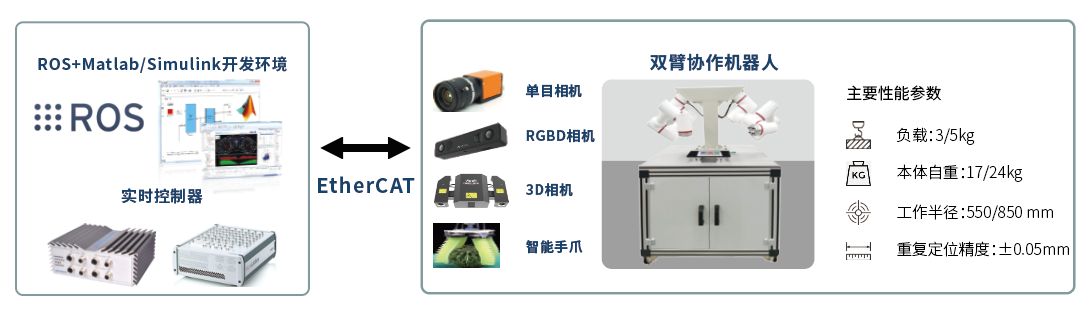
双臂协作机器人平台,通过EtherCAT总线将两台机器人看做一个网络,采用1台实时控制器控制,更利于双臂协同规划算法的执行。可搭配多种人工智能传感器和机器人末端,完成复杂环境下的多任务工作。
平台特点
1、1台控制器可同时控制两台机器人(12轴),
便于双臂协同算法编写
2、伺服驱动器可在位置模式、速度模式、力矩模式之间切换
3、机器人所有算法基于Matlab/Simulink软件编程,
一键编译下载至实时控制器
4、Matlab Real-time 图形化可编程上位机调试界面
5、集成ATI六维力/力矩传感器,重力补偿、相机标定、
坐标系标定算法开源
6、开源双臂协同运动规划算法
实验内容及目的
1、双臂基坐标系标定实验
2、双臂机器人关节空间速度规划实验
3、基于单目相机的视觉抓取实验
4、双机械臂协同运动规划实验
5、基于3D相机的无序物体抓取实验
6、基于视觉和力控的双臂机器人装配实验